NOTE: THIS DOCUMENT IS OBSOLETE, PLEASE CHECK THE NEW VERSION: "Mathematics of the Discrete Fourier Transform (DFT), with Audio Applications --- Second Edition", by Julius O. Smith III, W3K Publishing, 2007, ISBN 978-0-9745607-4-8. - Copyright © 2017-09-28 by Julius O. Smith III - Center for Computer Research in Music and Acoustics (CCRMA), Stanford University
<< Previous page TOC INDEX Next page >>
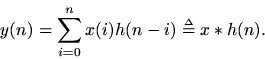
Convolution Representation of LTI FiltersIf
is the output of an LTI filter with input
and impulse response
, then
is the convolution of
with
,
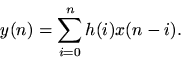
Since convolution is commutative (), we have also
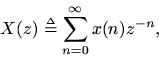
Definition. The unilateral
Thattransform of the discrete-time signal
are transform pairs is expressed by writing
or
.
Theorem. The convolution theorem (Papoulis [21]) states that
In words, convolution in the time domain is multiplication in the frequency domain.Taking the
whereis the
Definition. The transfer function
of a linear time-invariant discrete-time filter is defined to be the
.
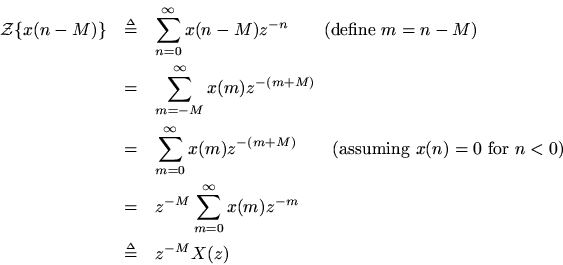
Theorem. The shift theorem [21] for
The shift theorem can be derived immediately from the definition of the):
The general difference equation for an LTI filter appears as
(B.10) (B.11)
Taking the, gives
(B.12) (B.13)
using linearity and the shift theorem. Replacingby
,
by
(B.14) (B.15)
or
(B.16) (B.17)
Defining the polynomials
(B.18) (B.19)
the
Finally, solving forwhich equals the transfer function